.png)
神戸電子専門学校 AIアプリケーションコース Cチームによる「ROKKONOVA」プロジェクトは、
六甲山・摩耶山エリアの交通渋滞を解決するためのAIカメラシステム開発を目的としています。
- 背景
六甲山・摩耶山エリアでは観光シーズンに交通渋滞が頻発しており、
現在の調査は人手に依存しているため継続性と正確性に課題があります。 - 目的
AIカメラを活用して交通・駐車場データを自動収集し、
渋滞原因の分析や予測につなげることで、混雑緩和策を実現することを目指しています。
システム概要
- 使用デバイス
- Jetson Nano
- カメラモジュール
- 技術
- YOLO(物体検出)による車両検出・分類
- Python
- Viewer App(React)
主な機能
交通データ収集
- 車種分類(車・バス・バイク・トラック等)
- 車両台数カウント
- 通過速度の推定
- 渋滞判定
駐車場データ収集
- ナンバープレート認識(OCR)
- 入退場ログの記録
- 滞在時間の算出
- 満車率の計算
気象・日時データ
- 日時(時間帯・曜日)の記録
- 天気・気温データの取得(外部API)
Viewerアプリ
- CSV/JSONデータをWebで読み込み
- グラフ・円グラフ・折れ線グラフで可視化
- 「交通量」「速度」「車種割合」「駐車場の利用状況」などを直感的に表示
実証実験
- 設置場所
- 六甲摩耶エリアの道路 1か所
- 六甲摩耶エリアの駐車場 1か所
- 評価方法
- AIカメラのカウントと人手調査の比較
- 混雑ピーク時間帯や車種割合をグラフ化
- AIによる自動計測の有効性を検証
メンバー紹介
- リコ→リーダー/バックエンド:駐車場処理、カメラ設計、YOLOによる認識処理
- オイル→バックエンド:交通量処理、速度推定、渋滞判定ロジック
- 岩本→フロントエンド/PM:Viewerアプリ設計、開発、進行管理
- 佐藤→資料担当:要件定義書・設計書・スライド作成
- スザン→フロントエンド:Viewerアプリ設計、開発
開発状況
現在は、以下の機能が実装できています。
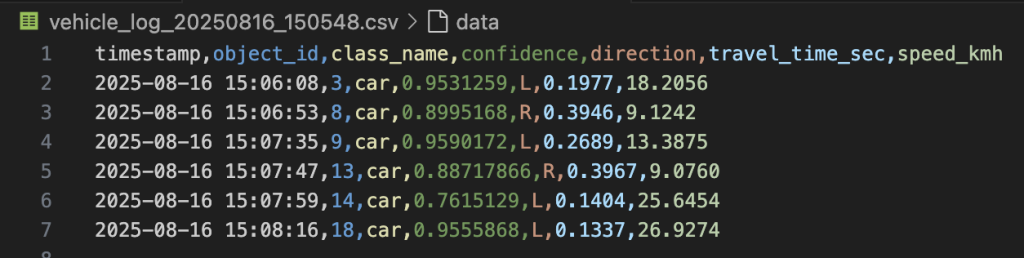
- 交通量データ取得
車両をカメラで検知し、CSVに記録。
記録される項目は「タイムスタンプ」「ID」「車種」「通過方向」「推定速度」。 - 駐車場データ取得
日本のナンバープレートから 漢字・ひらがな・数字 を正確に読み取ることに成功。
「入場時刻」、「四桁の数字」、「方向」、「地域」、「カナ文字」などを識別できています。 - Viewerアプリ
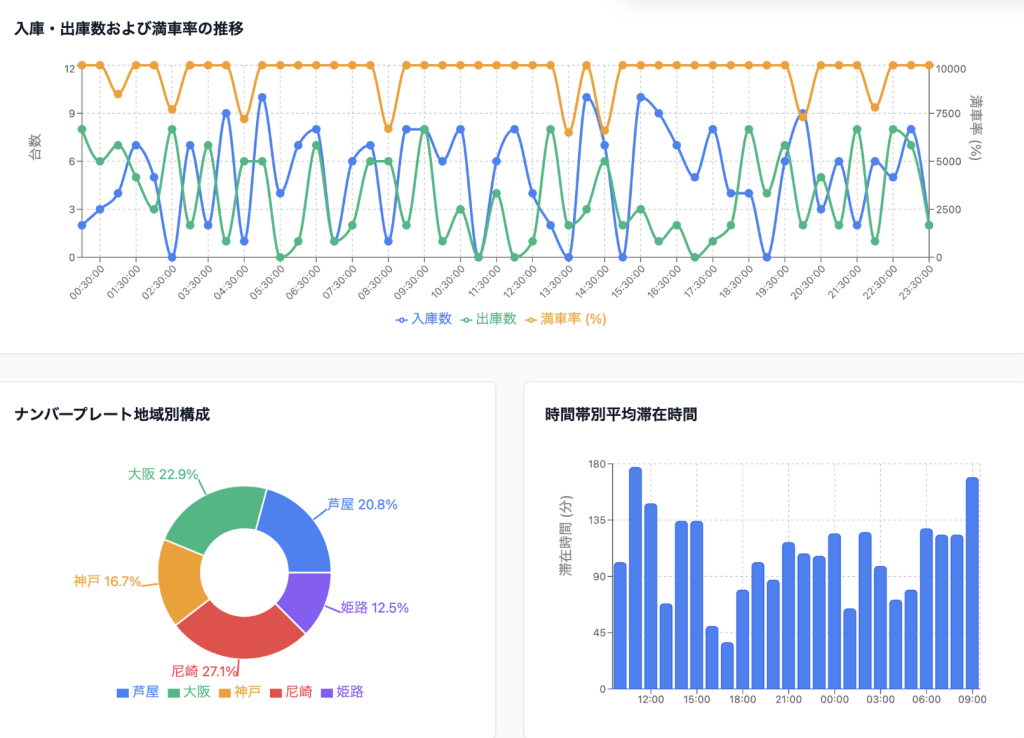
収集データをグラフ化して可視化。- 「駐車場画面」では、入庫数・出庫数・満車率の推移を折れ線グラフで表示。
→ 時間帯ごとの混雑状況を把握可能。
また、ナンバープレート地域別構成や平均滞在時間も表示し、
「どの地域からの利用が多いか」「どのくらい利用されているか」を確認できます。 - 「交通量画面」では、交通量と平均速度の関係を折れ線グラフで表示。
→ 混雑や渋滞の傾向を可視化。
車種別・用途別の構成比を円グラフで表示し、
「どのタイプの車が多いのか」「自家用車が中心か」を分析できます。
- 「駐車場画面」では、入庫数・出庫数・満車率の推移を折れ線グラフで表示。
実証した動画(見本)
交通量側
出力されたCSVファイル
駐車場側
出力されたCSVファイル
-1024x336.png)
Viewerアプリ画面
駐車場画面
交通量画面

実証実験で使用するAIカメラ
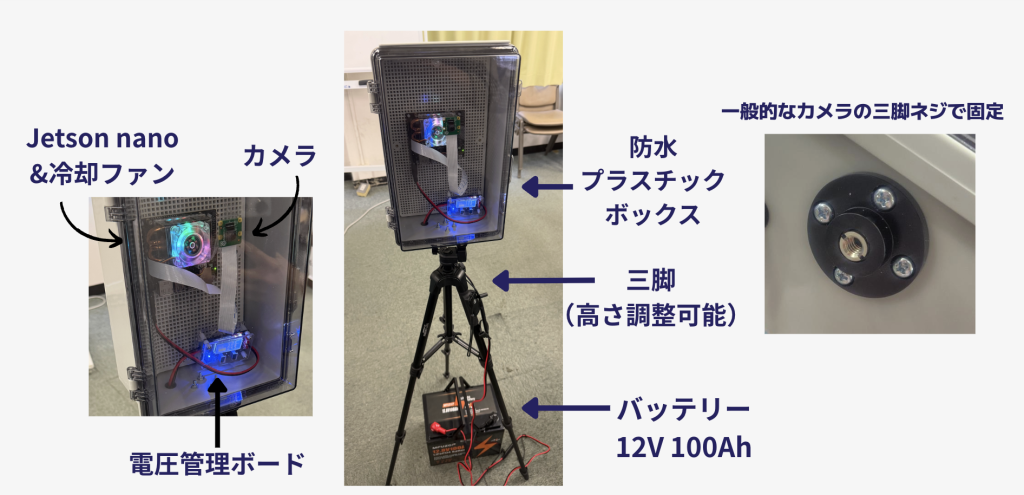
下部には三脚用のプレートを付けているため、市販の三脚にすぐ取り付けられます。
屋外運用を想定し、耐候性やメンテナンス性にも配慮した構成です。

お問い合わせ
リコ(リーダー)Email:kd1384338@st.kobedenshi.ac.jp

コメント